🎉 one paper is accepted by AAAI 2025!
Dec 10, 2024· ·
1 min read
·
1 min read
Shuai Zhou (David)
Welcome 👋 Please check the Post at RAP-LAB
Table of Contents
Overview
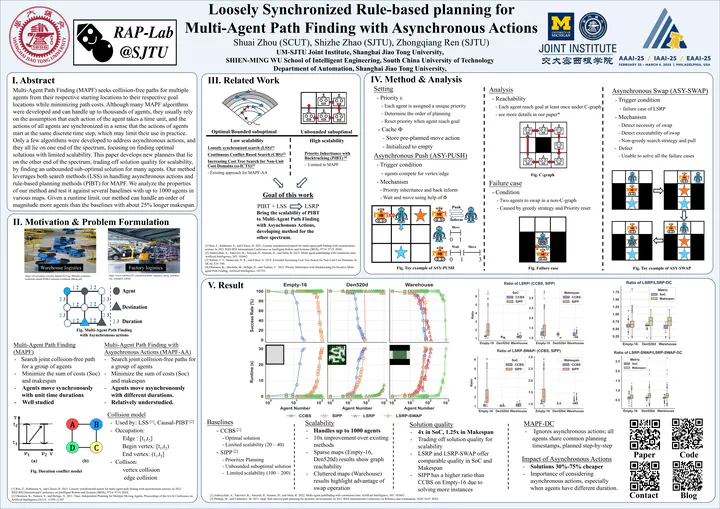
- A rule-based planner named LSRP was proposed to quickly find feasible solutions for MAPF-AA which is variant of MAPF, utilizing preset rules to achieve scalability that is an order of magnitude higher than existing algorithms.
- In traditional MAPF, both time and space are discrete, but as the number of agents increases, the dimensionality curse arises. Some approaches have been developed for large scale MAPF. When time becomes continuous and the search dimension doubles, it is even harder to find an feasible solution. LSRP effectively addresses these challenges
- Check out the full paper here! The work is done during my internship at RAP-LAB, University of Michigan-Shanghai Jiao Tong University Joint Insitute. Supervised by Professor Zhongqiang Ren and Dr.Shizhe Zhao.
Released under the MIT license.
{kind=link}